English
English
Can Bus, Bagaimana Cara Kerja dan Keuntungannya?
Diposting pada Januari 6, 2025 oleh Nur Wachda Mihmidati

Can bus bisa membantu kita dalam mengontrol individu dalam jaringan untuk bisa berkomunikasi. Lalu, bagaimana cara kerja dari can bus ini? Jika telah menggunakannya, apa saja sih keuntungannya? Bersama TransTRACK, kali ini kita akan mempelajari mengenai can bus melalui artikel berikut ini!
Apa itu Can Bus?
CAN bus adalah protokol berbasis pesan yang memungkinkan sistem, perangkat, dan pengontrol individu dalam jaringan untuk berkomunikasi. Secara umum, bus adalah sistem komunikasi multi-node yang mentransfer data antar komponen. Controller Area Network memungkinkan transfer data yang kuat dan latensi rendah antara sensor dan unit komputasi dalam sistem. Misalnya, salah satu perusahaan perangkat keras telah bekerja dengan klien untuk melengkapi peralatan pertanian seperti pemanen gabungan dan bagian mesin kompleks lainnya dengan perangkat keras yang mendukung CAN, memungkinkan berbagai komponen peralatan untuk menyampaikan informasi satu sama lain secara efisien dan efektif.
Setelah diperkenalkan pada pertengahan 1980-an, komunikasi bus CAN telah berkembang jauh melampaui industri otomotif tempat pertama kali diadopsi secara luas. Sebelum bus CAN mendapatkan popularitas, rangkaian kabel kendaraan dapat berisi bermil-mil kabel, dengan kumpulan kabel yang diperlukan untuk membawa berbagai sinyal ke dan dari sistem kendaraan yang saling berhubungan. Sebaliknya, bus CAN menggunakan sistem kabel twisted pair berkecepatan tinggi (25kbps – 1Mbps), sangat mengurangi jumlah kabel yang diperlukan agar komponen sistem dapat berkomunikasi.
Sementara CAN masih menjadi opsi yang digunakan secara luas di komputer dalam kendaraan modern, bus CAN sekarang juga diimplementasikan dalam berbagai aplikasi tertanam dan industri, mulai dari jalur perakitan dan mesin medis, hingga otomatisasi dan akses gedung. instalasi kontrol.
Cara Kerja Can Bus
Perangkat pada bus CAN disebut “node”. Setiap node terdiri dari CPU, pengontrol CAN, dan transceiver, yang menyesuaikan level sinyal dari data yang dikirim dan diterima oleh node. Semua node dapat mengirim dan menerima data, tetapi tidak pada saat yang bersamaan.
Node tidak dapat mengirim data secara langsung satu sama lain. Sebagai gantinya, mereka mengirim data mereka ke jaringan, di mana data itu tersedia untuk setiap node yang telah dituju. Protokol CAN adalah lossless, menggunakan metode arbitrasi bitwise untuk menyelesaikan perselisihan di bus.
Semua node disinkronkan sehingga semua sampel data di jaringan secara bersamaan. Namun, data tidak ditransmisikan dengan data jam (waktu), jadi CAN bukanlah bus yang benar-benar sinkron, dengan CAN, semua data dikirim dalam frame, dan ada empat jenis:
- Data frames, mentransfer data ke satu atau banyak node penerima
- Remote frames, meminta data dari node lain
- Error frames melaporkan kesalahan
- Overload frames melaporkan kondisi beban berlebih
Ada dua varian message length: standar dan extended. Perbedaan sebenarnya adalah pengidentifikasi 18-bit tambahan di bidang arbitrase.
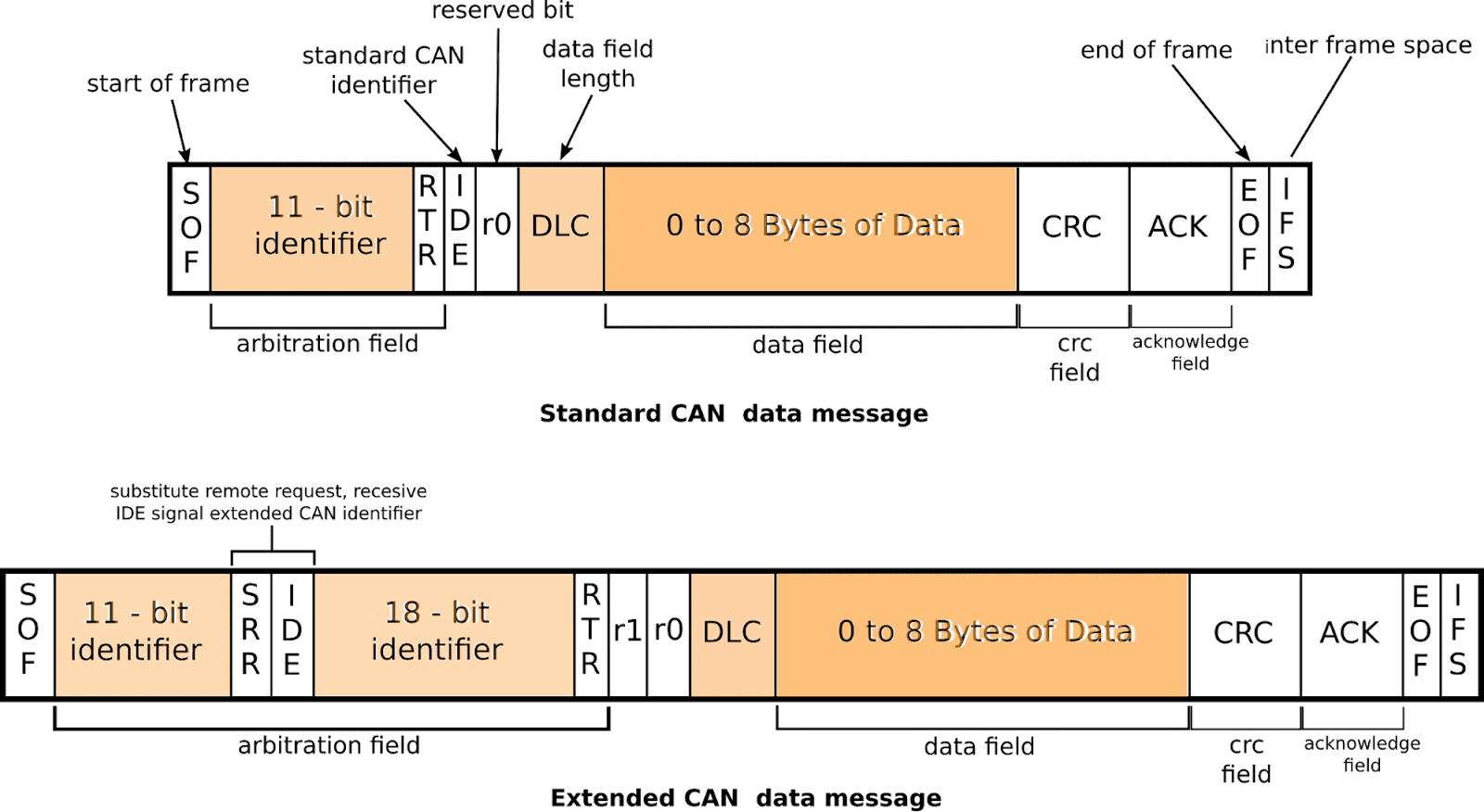
Bidang arbitrase berisi nomor identifikasi pesan dan bit permintaan transmisi jarak jauh. Pesan yang lebih penting memiliki nomor ID yang lebih rendah.
Jika beberapa node mentransmisikan pada saat yang sama, mereka memulai arbitrase secara bersamaan. Node dengan nomor ID pesan terendah mendapat prioritas. Bit dominan menimpa bit resesif pada bus CAN.
Pengidentifikasi pesan dapat berukuran 11-bit (Standard CAN, 2048 pengidentifikasi pesan berbeda) atau panjangnya 29 bit (Extended CAN, 537 juta pengidentifikasi pesan berbeda). Bit permintaan transmisi jarak jauh dominan dan menunjukkan bahwa data sedang dikirim.
Di sebagian besar sistem, logika 1 mewakili tinggi, dan logika 0 mewakili rendah. Tapi ini sebaliknya di bus CAN. Oleh karena itu, transceiver CAN biasanya menggunakan pull-up pada input driver dan output penerima, sehingga perangkat telah default ke status bus resesif.
Komponen Utama dalam CAN Bus
Berikut adalah penjelasan rinci dari komponen utama dalam sistem CAN Bus:
- ECU (Electronic Control Unit)
ECU adalah modul kontrol elektronik yang bertanggung jawab untuk mengirim dan menerima data dalam sistem CAN Bus. Setiap ECU memiliki tugas spesifik, seperti mengelola sistem mesin, rem ABS, atau pengaturan jendela. ECU bekerja sebagai node dalam jaringan CAN Bus, berkomunikasi dengan unit lainnya tanpa memerlukan pusat kontrol utama. - CAN Controller
Komponen ini bertugas mengatur alur data sesuai dengan protokol CAN. CAN Controller memproses data yang diterima dari ECU dan menyiapkan pesan untuk dikirimkan ke jaringan. Ini memastikan bahwa data dikirim sesuai dengan prioritas dan standar komunikasi CAN. - CAN Transceiver
Transceiver berfungsi sebagai jembatan antara CAN Controller dan Bus Line. Komponen ini mengonversi sinyal digital dari CAN Controller menjadi sinyal listrik yang dapat ditransmisikan melalui kabel Bus Line, dan sebaliknya, mengubah sinyal listrik menjadi data digital untuk diteruskan ke ECU. - Bus Line
Bus Line adalah media fisik untuk transmisi data antar komponen. Biasanya menggunakan kabel twisted pair untuk mengurangi gangguan elektromagnetik. Semua node dalam jaringan terhubung ke Bus Line, memungkinkan data dikirim dan diterima secara efisien di seluruh sistem.
Dengan keempat komponen ini, sistem CAN Bus dapat bekerja secara terintegrasi, memastikan komunikasi yang andal dan efisien antar modul kendaraan.
Keuntungan Menggunakan Can Bus
Standar bus CAN diterima secara luas dan digunakan di hampir semua kendaraan dan banyak mesin. Berikut keuntungan dari menggunakan Can Bus adalah:
- Sederhana dan Biaya Rendah : ECU berkomunikasi melalui sistem CAN tunggal alih-alih melalui jalur sinyal analog kompleks langsung – mengurangi kesalahan, berat, kabel, dan biaya. CAN chipset sudah tersedia dan terjangkau.
- Sepenuhnya Terpusat : bus CAN menyediakan satu titik masuk untuk berkomunikasi dengan semua ECU jaringan – memungkinkan diagnostik pusat, pencatatan data, dan konfigurasi.
- Sangat Kuat : sistem ini kuat terhadap gangguan listrik dan interferensi elektromagnetik – ideal untuk aplikasi keselamatan kritis (misalnya kendaraan)
- Efisien : Frame CAN diprioritaskan berdasarkan nomor ID. Data prioritas utama mendapat akses bus langsung, tanpa menyebabkan interupsi pada frame lainnya.
- Mengurangi Berat Kendaraan : dengan menghilangkan kilometer kabel listrik yang sangat terisolasi dan beratnya dari kendaraan.
- Penerapan Mudah : standar yang terbukti dengan ekosistem pendukung yang kaya.
- Tahan terhadap EMI : ini menjadikan CAN ideal untuk aplikasi kritis pada kendaraan.
CAN memiliki kontrol yang sangat baik dan kemampuan deteksi kesalahan. Mendeteksi kesalahan mudah dilakukan, dengan demikian data yang dikirimkan sampai ke tempat yang dituju.
Ini adalah protokol yang ideal ketika kontrol terdistribusi dari sistem yang kompleks diperlukan. Ini mengurangi kabel yang berat dan dengan demikian biaya dan berat. Biaya chip rendah, dan penerapan CAN relatif mudah karena desain protokol yang bersih.
Keuntungan lain menggunakan CAN adalah bahwa dua lapisan pertama: lapisan fisik dan lapisan data link, diimplementasikan dalam microchip murah, tersedia dalam beberapa konfigurasi.
Tipe Can Bus
Standar ISO 11898 mendefinisikan beberapa versi CAN. Jenis CAN dominan yang digunakan dalam industri otomotif adalah:
- Low Speed CAN
- High Speed CAN
- CAN FD (Flexible Data Rate CAN)
Low Speed CAN
Digunakan untuk sistem yang toleran terhadap kesalahan yang tidak memerlukan tingkat pembaruan yang tinggi. Kecepatan transfer data maksimum adalah 125 kbps, tetapi pemasangan kabel lebih ekonomis daripada CAN berkecepatan tinggi. Dalam aplikasi otomotif, CAN kecepatan rendah digunakan untuk diagnostik, kontrol dan tampilan dasbor, power window, dll.
High Speed CAN
Digunakan untuk komunikasi antara subsistem penting yang memerlukan tingkat pembaruan tinggi dan akurasi data tinggi (misalnya, sistem pengereman anti-lock, kontrol stabilitas elektronik, kantung udara, unit kontrol mesin, dll). Kecepatan transfer data CAN berkecepatan tinggi berkisar antara 1 kbit hingga 1 Mbit per detik.
CAN berkecepatan tinggi lebih cepat daripada kecepatan rendah, tetapi kebutuhan bandwidth untuk aplikasi otomotif baru meningkat setiap tahun, sehingga OEM mobil kini memasang CAN FD ke dalam mobil baru. CAN FD telah dideskripsikan sebagai “CAN on steroids.”
CAN FD (Flexible Data Rate CAN)
Versi terbaru CAN memperkenalkan kecepatan data yang fleksibel, lebih banyak data per pesan, dan transmisi kecepatan yang jauh lebih tinggi. Panjang data dalam setiap pesan CAN standar (kecepatan rendah dan kecepatan tinggi) adalah 8 byte, tetapi dengan CAN FD ini telah ditingkatkan 800% menjadi 64 byte data. Selain itu, kecepatan data maksimum juga meningkat drastis dari 1 Mbps menjadi 8 Mbps.

Bagaimana? Sudah bisa memahami Can Bus yang telah dijelaskan di atas? Jika sudah bisa memahaminya, kalian bisa memulai untuk menggunakan fleet management system yang ada pada TransTRACK untuk manajemen armadamu yang lebih baik sekaligus aman. Karena TransTRACK telah terintegrasi secara langsung dengan sistem Kementrian Perhubungan Republik Indonesia yang mendukung penerbitan ijin trayek pada angkutan penumpang.

Postingan Terbaru


Topik :