 Bahasa Indonesia
Bahasa Indonesia
Can Bus, How Does it Work and Its Benefits?
Posted on January 6, 2025 by Nur Wachda Mihmidati
Can bus can help us control individuals in the network to be able to communicate. Then, how does this can bus work? If you have used it, what are the benefits? Together with TransTRACK, this time we will learn about the can bus through the following article!
What is Can Bus?
CAN bus is a message-based protocol that allows individual systems, devices, and controllers in a network to communicate. In general, the bus is a multi-node communication system that transfers data between components. Controller Area Network enables robust, low-latency data transfer between sensors and computing units in the system. For example, one hardware company has been working with clients to equip agricultural equipment such as combine harvesters and other complex machinery parts with CAN-enabled hardware, allowing various equipment components to relay information to each other efficiently and effectively.
After its introduction in the mid-1980s, CAN bus communication has expanded far beyond the automotive industry where it was first widely adopted. Before the CAN bus gained popularity, vehicle wiring harnesses could contain miles of cables, with bundles of wires required to carry various signals to and from interconnected vehicle systems. In contrast, the CAN bus utilizes a high-speed (25kbps – 1Mbps) twisted pair wiring system, greatly reducing the number of wires required for system components to communicate.
While CAN is still a widely used option in modern in-vehicle computers, the CAN bus is now also implemented in a variety of embedded and industrial applications, ranging from assembly lines and medical machinery, to building automation and access control installations.
How the CAN Bus Works
Devices on the CAN bus are called “nodes”. Each node consists of a CPU, a CAN controller, and a transceiver, which adjusts the signal level of the data sent and received by the node. All nodes can send and receive data, but not at the same time.
Nodes cannot send data directly to each other. Instead, they send their data to the network, where it is available to any node it has been addressed to. The CAN protocol is lossless, using a bitwise arbitration method to resolve disputes on the bus.
All nodes are synchronized so that all data samples on the network simultaneously. However, data is not transmitted with clock data (time), so CAN is not a truly synchronous bus, with CAN, all data is sent in frames, and there are four types:
- Data frames, transferring data to one or many receiving nodes
- Remote frames, requesting data from another node
- Error frames report errors
- Overload frames report overload conditions
There are two variants of message length: standard and extended. The real difference is the additional 18-bit identifier in the arbitration field.
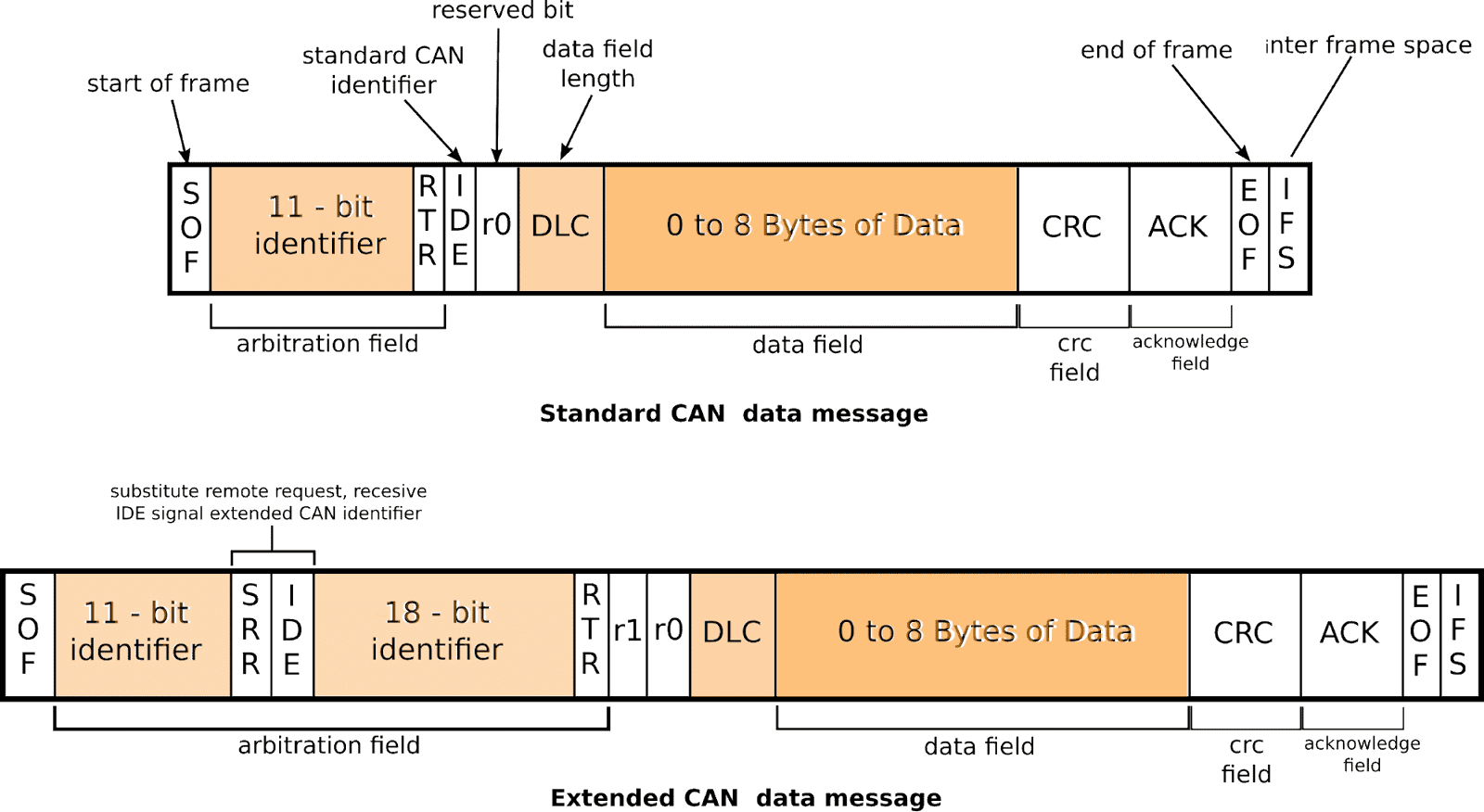
The arbitration field contains the message identification number and the remote transmission request bit. More important messages have lower ID numbers.
If multiple nodes are transmitting at the same time, they start arbitration simultaneously. The node with the lowest message ID number gets priority. Dominant bits override recessive bits on the CAN bus.
The message identifier can be 11-bits long (Standard CAN, 2048 different message identifiers) or 29 bits long (Extended CAN, 537 million different message identifiers). The remote transmission request bit is dominant and indicates that data is being transmitted.
In most systems, logic 1 represents high, and logic 0 represents low. But this is the opposite on the CAN bus. Therefore, CAN transceivers typically use pull-ups on the driver inputs and receiver outputs, so the devices have defaulted to the recessive bus state.
Main Components in CAN Bus
The following is a detailed description of the main components in the CAN Bus system:
- ECU (Electronic Control Unit)ECU is an electronic control module responsible for sending and receiving data in the CAN Bus system. Each ECU has specific tasks, such as managing engine systems, ABS brakes, or window settings. ECUs work as nodes in the CAN Bus network, communicating with other units without the need for a main control center.
- CAN Controller This component is in charge of managing the data flow according to the CAN protocol. The CAN Controller processes the data received from the ECU and prepares messages for transmission to the network. It ensures that the data is transmitted according to the priorities and standards of CAN communication.
- CAN Transceiver The Transceiver serves as a bridge between the CAN Controller and the Bus Line. It converts digital signals from the CAN Controller into electrical signals that can be transmitted through the Bus Line cable, and vice versa, converts electrical signals into digital data to be forwarded to the ECU.
- Bus Line Bus Line is the physical medium for data transmission between components. It typically uses twisted pair cables to reduce electromagnetic interference. All nodes in the network are connected to the Bus Line, allowing data to be sent and received efficiently throughout the system.
With these four components, the CAN Bus system can work in an integrated manner, ensuring reliable and efficient communication between vehicle modules.
Advantages of Using CAN Bus
The CAN bus standard is widely accepted and used in almost all vehicles and many machines. The following advantages of using CAN Bus are:
- Simple and Low Cost: The ECU communicates via a single CAN system instead of via direct complex analog signal lines – reducing errors, weight, wiring and costs. CAN chipsets are readily available and affordable.
- Fully Centralized: the CAN bus provides a single point of entry to communicate with all networked ECUs – enabling central diagnostics, data logging and configuration.
- Highly Robust: the system is robust against electrical noise and electromagnetic interference – ideal for safety critical applications (e.g. vehicles)
- Efficient: CAN frames are prioritized by ID number. Top priority data gets direct bus access, without causing interruptions to other frames.
- Reduced Vehicle Weight: by removing kilometers of highly insulated power cables and their weight from the vehicle.
- Easy Deployment: a proven standard with a rich ecosystem of supporters.
- Resistant to EMI: this makes CAN ideal for critical applications in vehicles.
CAN has excellent control and error detection capabilities. Detecting errors is easy, thus the transmitted data reaches the intended place.
It is an ideal protocol when distributed control of complex systems is required. It reduces heavy wiring and thus cost and weight. Chip costs are low, and implementing CAN is relatively easy due to the clean design of the protocol.
Another advantage of using CAN is that the first two layers: the physical layer and the data link layer, are implemented in cheap microchips, available in several configurations.
[display-post-read-also]
CAN Bus Types
The ISO 11898 standard defines several versions of CAN. The dominant CAN types used in the automotive industry are:
- Low Speed CAN
- High Speed CAN
- CAN FD (Flexible Data Rate CAN)
Low Speed CAN
Used for fault-tolerant systems that do not require a high update rate. The maximum data transfer rate is 125 kbps, but cabling is more economical than high-speed CAN. In automotive applications, low speed CAN is used for diagnostics, dashboard controls and displays, power windows, etc.
High Speed CAN
Used for communication between critical subsystems that require high update rates and high data accuracy (e.g., anti-lock braking systems, electronic stability control, airbags, engine control units, etc). The data transfer rate of high-speed CAN ranges from 1 kbit to 1 Mbit per second.
High-speed CAN is faster than low-speed, but bandwidth requirements for new automotive applications are increasing every year, so car OEMs are now installing CAN FD into new cars. CAN FD has been described as “CAN on steroids.”
CAN FD (Flexible Data Rate CAN)
The latest version of CAN introduces flexible data rates, more data per message, and much higher speed transmission. The data length in each standard CAN message (low-speed and high-speed) is 8 bytes, but with CAN FD this has been increased by 800% to 64 bytes of data. In addition, the maximum data rate has also increased dramatically from 1 Mbps to 8 Mbps.

How is it? Can you understand the Can Bus that has been explained above? If you can understand it, you can start using the fleet management system in TransTRACK for better and safer management of your fleet. Because TransTRACK has been integrated directly with the system of the Ministry of Transportation of the Republic of Indonesia which supports the issuance of route permits on passenger transportation.

Recent Post



Topic :



